
机器人系统中存在大量数据,这些数据在计算过程中往往都处于数据形态,比如图像数据中0~255的RGB值。但是这种数据形态的值往往不利于开发者去感受数据所描述的内容,所以常常需要将数据可视化显示,例如机器人模型的可视化、图像数据的可视化、地图数据的可视化等。
ROS针对机器人系统的可视化需求,为用户提供了一款显示多种数据的三维可视化平台——rviz。
rviz是一款三维可视化工具数据可视化开发平台,很好的兼容了各种基于ROS软件框架的机器人平台。在rviz中,可以使用XML对机器人、周围物体等任何实物进行尺寸、质量、位置、材质、关节等属性的描述,并且在界面中呈现出来。同时,rviz还可以通过图形化的方式,实时显示机器人传感器的信息、机器人的运动状态、周围环境的变化等。
总而言之,rviz帮助开发者实现所有可监测信息的图形化显示,开发者也可以在rviz的控制界面下,通过按钮、滑动条、数值等方式,控制机器人的行为。
一、安装并运行rviz
rviz已经集成在桌面完整版的ROS系统当中,如果已经成功安装了桌面完整版的ROS,可以直接跳过这一步骤,否则,请使用如下命令进行安装:
$ sudo apt-get install ros-kinetic-rviz
安装完成后,在终端中分别运行如下命令即可启动ROS系统和rviz平台:
$ roscore
$ rosrun rviz rviz
启动成功的rviz主界面如下图所示:
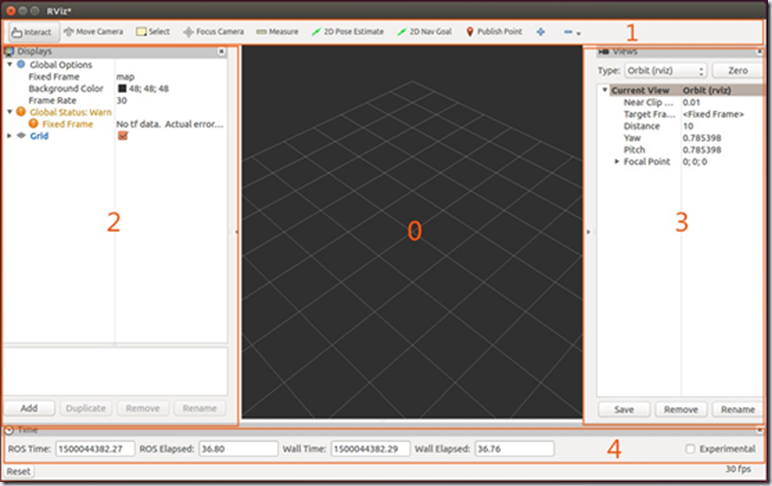
该界面主要包含以下几个部分:
rviz的运行已经没问题了,那么如何将数据在rviz中可视化显示呢?
二、数据可视化
进行数据可视化的前提当然是要有数据,假设需要可视化的数据以对应的消息类型发布,我们在rviz中使用相应的插件订阅该消息即可实现显示。
首先,需要添加显示数据的插件。点击rviz界面左侧下方的“Add”按键,rviz会将默认支持的所有数据类型的显示插件罗列出来数据可视化开发平台,如下图所示:
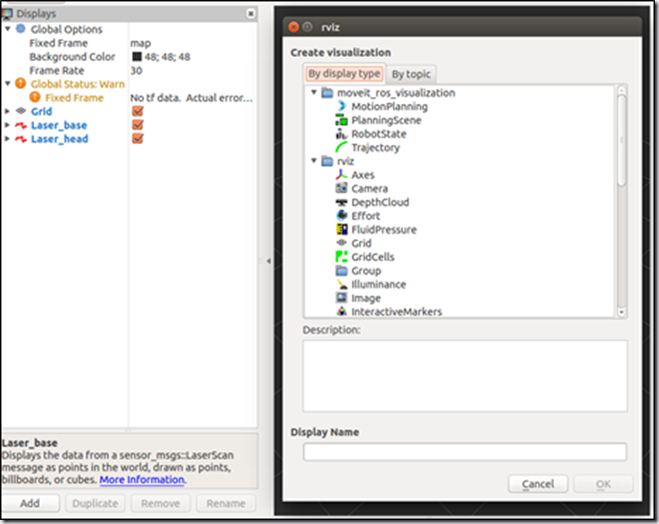
在列表中选择需要的数据类型插件,然后在“DisplayName”里填入一个唯一的名称,用来识别显示的数据。例如显示两个激光传感器的数据,可以分别添加两个LaserScan类型的插件,命名为Laser_base和Laser_head进行显示。
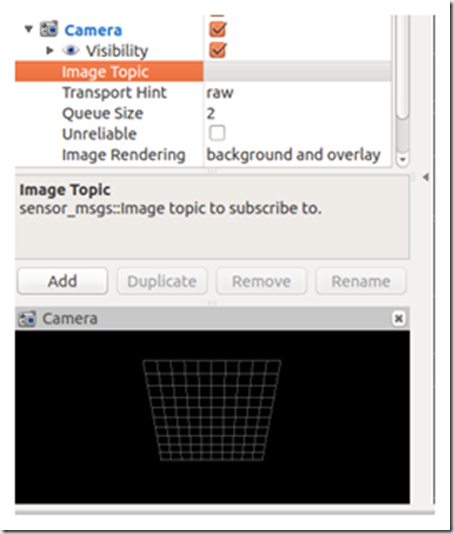
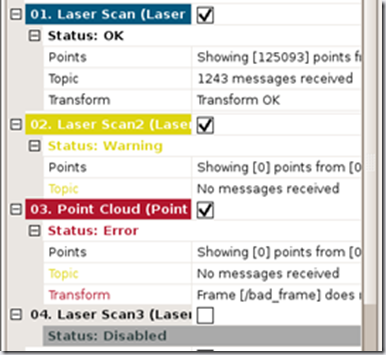
添加完成后,rviz左侧的Dispaly中会列出已经添加的显示插件;点击插件列表前的加号,可以打开一个属性列表,根据需求设置属性。一般情况下,“Topic”属性较为重要,用来声明该显示插件所订阅的数据来源,如果订阅成功,在中间的显示区应该会出现可视化后的数据。
如果显示有问题,请检查属性区域的“Status”状态。Status有四种状态:OK、Warning、Error和Disabled,如果显示的状态不是OK,那么请查看错误信息,并详细检查数据发布是否正常。
来源【首席数据官】,更多内容/合作请关注「辉声辉语」公众号,送10G营销资料!
版权声明:本文内容来源互联网整理,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 jkhui22@126.com举报,一经查实,本站将立刻删除。





